菜鸡求教,stm32f103的板子,做两路pwm输出,结果有一路没反应。
本菜鸡想用stm32103的板子控制两路舵机,就干脆直接在pwm程序上改了。我查了一下TIM3通道2的复用口的PB5,我就加一个通道1的复用口的PB4。
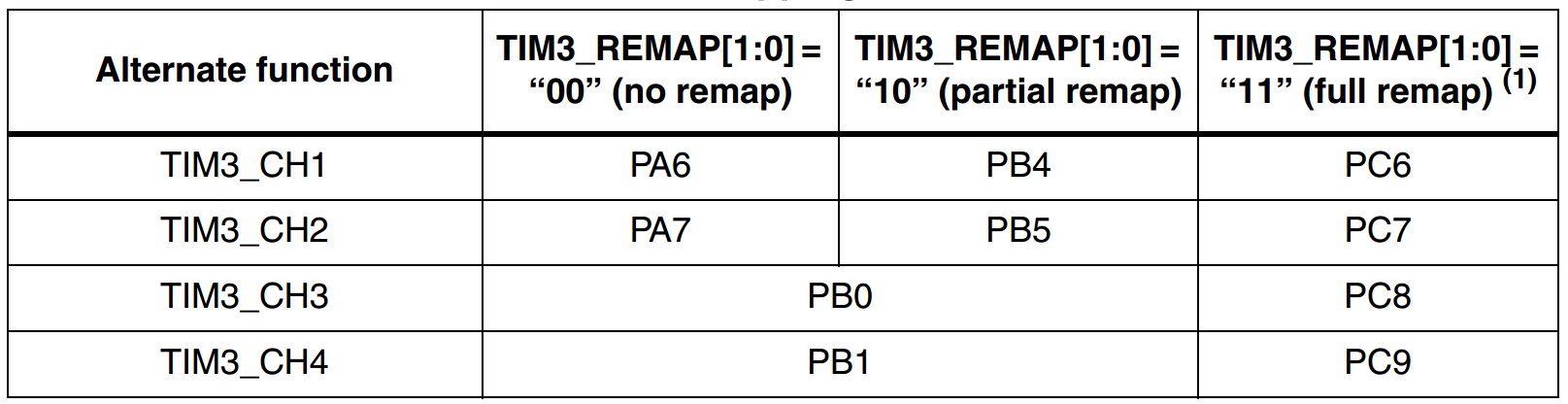
但结果是原来的PB5口好用得很,但新加的PB4口毛用没有。求大神帮我解答,万分感谢!
void TIM3_PWM_Init(u16 arr,u16 psc)
{
//定义变量
GPIO_InitTypeDef GPIO_InitStructure;
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_OCInitTypeDef TIM_OCInitStructure;
//IO口配置
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE);
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE);
//使能PA4、PA5
GPIO_InitStructure.GPIO_Pin =GPIO_Pin_4|GPIO_Pin_5;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOB, &GPIO_InitStructure);
//定时器通用配置
TIM_TimeBaseStructure.TIM_Period = arr;
TIM_TimeBaseStructure.TIM_Prescaler =psc;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
//通道1配置
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
//通道2配置
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3, ENABLE);
}
int main(void)
{
u16 led0pwmval=0;
u8 dir=1;
delay_init();
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
LED_Init();
TIM3_PWM_Init(20000-1,72-1);
while(1)
{
TIM_SetCompare2(TIM3,20000-500);
TIM_SetCompare1(TIM3,20000-500);
delay_ms(1000);
TIM_SetCompare2(TIM3,20000-550);
TIM_SetCompare1(TIM3,20000-550);
delay_ms(1000);
}
}
IO口配置应该没有问题的,主要看下:
1.你可以只开PB4一路试下,看行不行。
2.你的PWM输出频率周期是多少?可以先把while(1)里面的内容去掉,将
TIM_SetCompare2(TIM3,20000-500);
TIM_SetCompare1(TIM3,20000-500);
两行放到 TIM3_PWM_Init(20000-1,72-1); 下面试下,看看两路有没有波形
3.如果还是都不行,可以参考我在stm32f105的板子上的4路PWM的代码,如下面所示
u16 CCR1_Val = 500;
u16 CCR2_Val = 375;
u16 CCR3_Val = 250;
u16 CCR4_Val = 125;
ErrorStatus HSEStartUpStatus;
/* Private function prototypes -----------------------------------------------*/
void RCC_Configuration(void);
void GPIO_Configuration(void);
void NVIC_Configuration(void);
/* Private functions ---------------------------------------------------------*/
/*******************************************************************************
* Function Name : main
* Description : Main program
* Input : None
* Output : None
* Return : None
*******************************************************************************/
int main(void)
{
#ifdef DEBUG
debug();
#endif
/* System Clocks Configuration */
RCC_Configuration();
/* NVIC Configuration */
NVIC_Configuration();
/* GPIO Configuration */
GPIO_Configuration();
/* -----------------------------------------------------------------------
TIM3 Configuration: generate 4 PWM signals with 4 different duty cycles:
TIM3CLK = 36 MHz, Prescaler = 0x0, TIM3 counter clock = 36 MHz
TIM3 ARR Register = 999 => TIM3 Frequency = TIM3 counter clock/(ARR + 1)
TIM3 Frequency = 36 KHz.
TIM3 Channel1 duty cycle = (TIM3_CCR1/ TIM3_ARR)* 100 = 50%
TIM3 Channel2 duty cycle = (TIM3_CCR2/ TIM3_ARR)* 100 = 37.5%
TIM3 Channel3 duty cycle = (TIM3_CCR3/ TIM3_ARR)* 100 = 25%
TIM3 Channel4 duty cycle = (TIM3_CCR4/ TIM3_ARR)* 100 = 12.5%
----------------------------------------------------------------------- */
/* Time base configuration */
TIM_TimeBaseStructure.TIM_Period = 999;
TIM_TimeBaseStructure.TIM_Prescaler = 0;
TIM_TimeBaseStructure.TIM_ClockDivision = 0;
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;
TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);
/* PWM1 Mode configuration: Channel1 */
TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR1_Val;
TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
TIM_OC1Init(TIM3, &TIM_OCInitStructure);
TIM_OC1PreloadConfig(TIM3, TIM_OCPreload_Enable);
/* PWM1 Mode configuration: Channel2 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR2_Val;
TIM_OC2Init(TIM3, &TIM_OCInitStructure);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
/* PWM1 Mode configuration: Channel3 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR3_Val;
TIM_OC3Init(TIM3, &TIM_OCInitStructure);
TIM_OC3PreloadConfig(TIM3, TIM_OCPreload_Enable);
/* PWM1 Mode configuration: Channel4 */
TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
TIM_OCInitStructure.TIM_Pulse = CCR4_Val;
TIM_OC4Init(TIM3, &TIM_OCInitStructure);
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_ARRPreloadConfig(TIM3, ENABLE);
/* TIM3 enable counter */
TIM_Cmd(TIM3, ENABLE);
while (1)
{}
}